






imx METIS EC PI
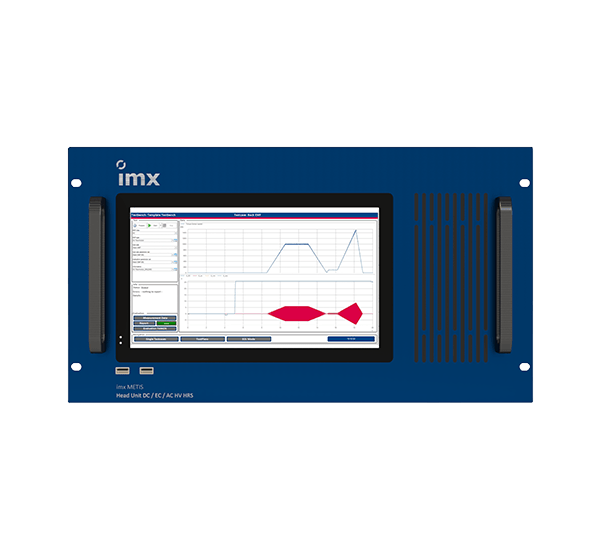
imx METIS basiert auf einem modularen und erweiterbaren Hardwarekonzept. Dabei übernehmen zwei funktionale Module alle wichtigen Aufgaben.
Die Head Unit dient der Messdatenerfassung und Prüfablaufsteuerung. Die Control Unit enthält unter anderem notwendige Regler und Motorcontroller. Ergänzt wird das System mit einer Sicherheits-SPS. Netzteile und unterbrechungsfreie Spannungsversorgungen für den PC und die Kommunikation vervollständigen die wichtigsten Hardware-Komponenten.
Alle Einheiten werden in einem 19“-Schrank zusammengeführt. Somit wird jede imx METIS Lösung als geschlossenes, betriebsbereites System geliefert.
Überragende Features
Hohe Testgeschwindigkeit
Sekunden bis Minuten – auch bei Antrieben mit mehreren hundert Kilowatt.
Vollautomatischer Ablauf
Schnelle Integration und sehr einfache Prüfdurchführung.
Systemintegration
Diverse Schnittstellen wie CSV-Export, REST-API u. v. m.
Datenrückverfolgbarkeit
Rohdaten, Ergebnisse und Metadaten werden konsistent gespeichert.
Reporting
Metadaten und Messergebnisse – per Knopfdruck als PDF exportiert.
Erweiterbarkeit
Erweiterbar um Prüfarten wie NVH-, HV- und ISO-Prüfung.
Prüfen von permanenterregten Synchronmotoren
imx METIS EC PI für permanenterregte Synchronmotoren
Die Prüfung eines permanent erregten Synchronmotors erfolgt standardmäßig mit dem in imx METIS integrierten Motorcontroller. Ein einmaliges Anlernen eine Prüflingtyps am Testsystem genügt, um alle nachfolgenden Prüfungen vollautomatisch durchzuführen. Zu Beginn jeder Prüfung wird die Rotorlage prüflingsindividuell ermittelt, sodass der Motor korrekt kommutiert werden kann. Zugleich wird der Geberoffset erfasst und gegebenenfalls zur Weiterverarbeitung gespeichert.
Für die Prüfung werden nur der Prüfling selbst und eine Drehzahl- oder Drehwinkelmessung benötigt, die prüflingsseitig oder über eine externe Sensorik bereitgestellt wird. Eine zusätzliche Belastungsmaschine oder Bremse sind nicht notwendig.
Für die Ansteuerung wird standardmäßig ein Universalcontroller verwendet. Bei Bedarf ist das Verfahren auch mit einem kundenseitigen Controller realisierbar.
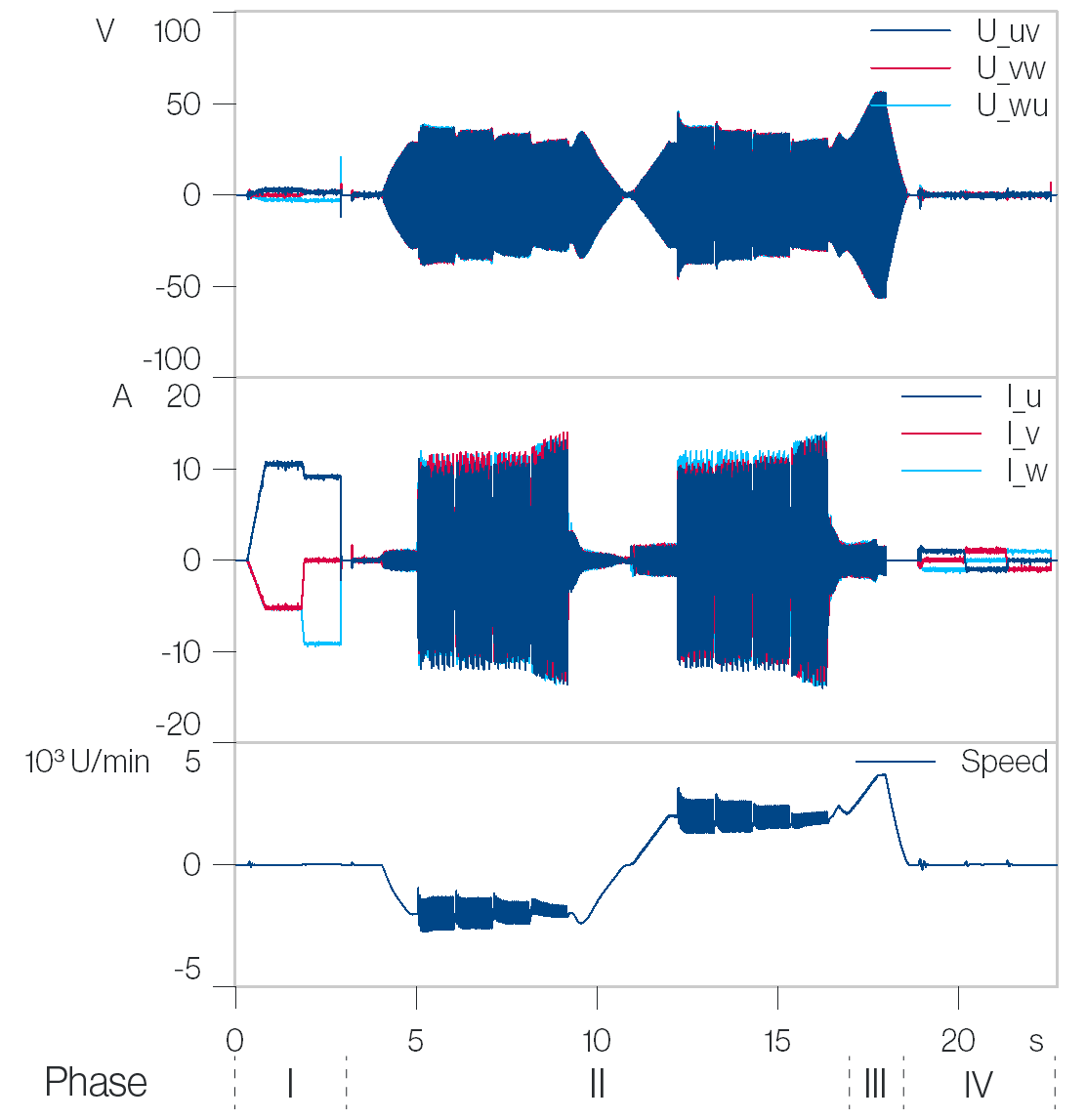
Prüfablauf
-
Phase I
Qualitäts- und Offsetermittlung des Winkelgebers. Bei integrierten Gebern automatisch, bei externen Sensoren durch Einlernen des Winkeloffsets -
Phase II
Durch eine Dynamische Anregung erfolgt die Bestimmung von Induktivitäten, magnetischen Flüssen und Massenträgheit -
Phase III
Auslauf aus der Leerlaufdrehzahl zur Ermittlung der Reibparameter -
Phase IV
Einprägen eines konstanten DC-Stromes zur Bestimmung der Wicklungswiderstände
Primäre Prüfergebnisse
- Widerstand einzelner Phasen
- Erregerfluss
- Spektrum der Generatorspannung und Generatorkonstante
- Induktivitäten Ld und Lq (Sättigung und Kreuzkopplung durch nichtlineares Flussmodell)
- Geberoffset von Absolutwertgebern
- bei Resolver oder Sin/Cos-Gebern Offset und Amplitude, Übersetzungsverhältnis, Phasenverschiebung und das Spektrum
- Gleit- und Haftreibung
- Massenträgheit
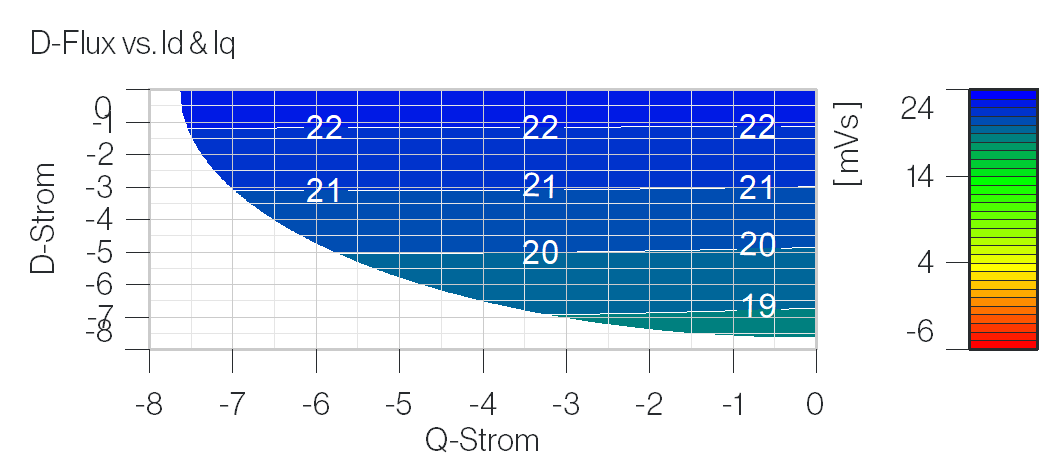
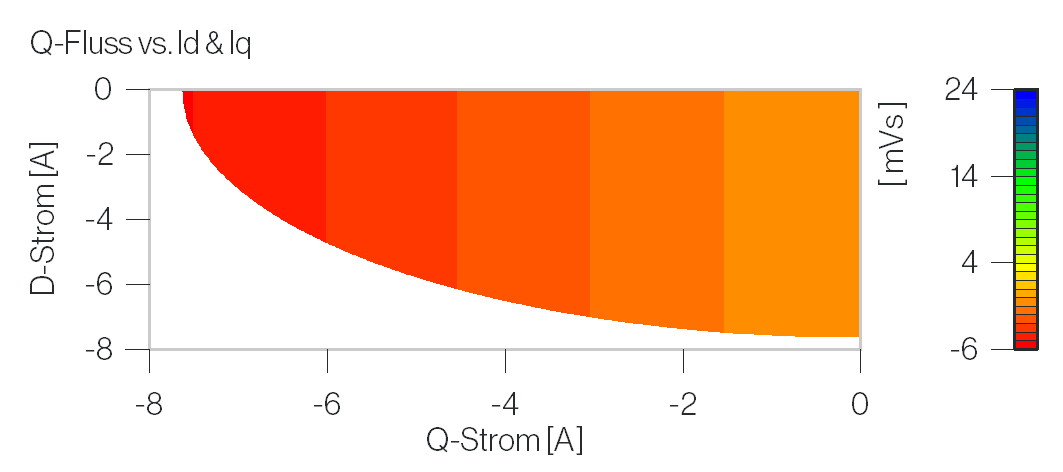
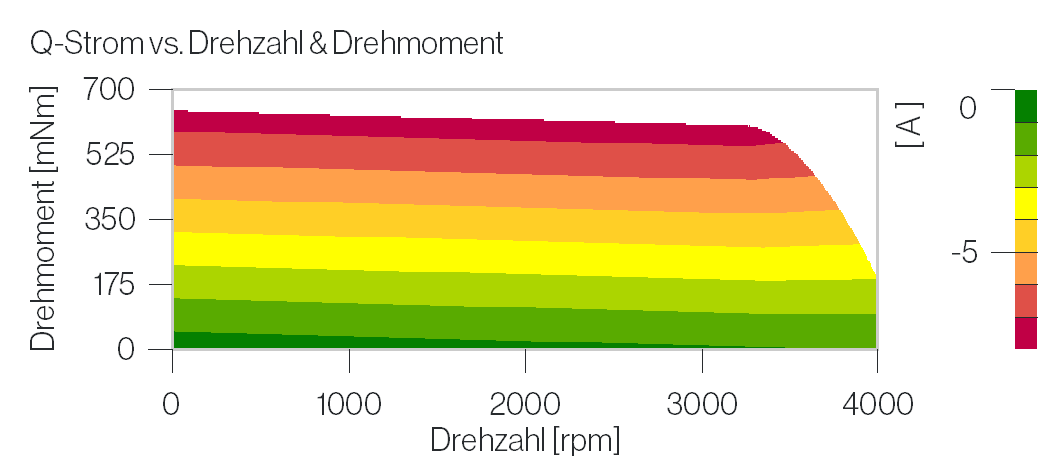
Abgeleitete Kenngrößen
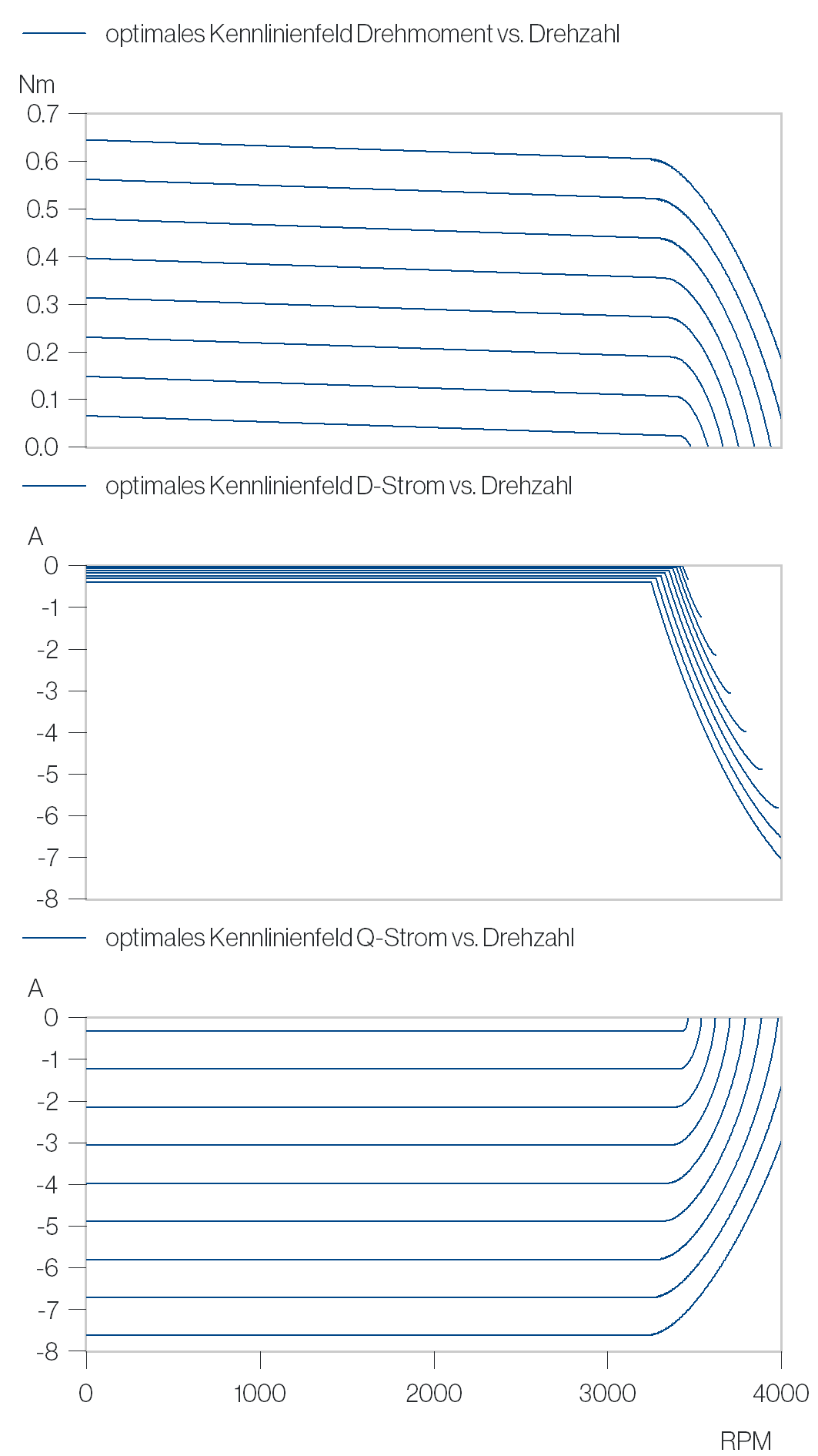
- optimale Kennlinien
- Kennfelder mit optimalen D- und Q-Strom
- D- und Q-Fluss in Abhängigkeit von D- und Q-Strom
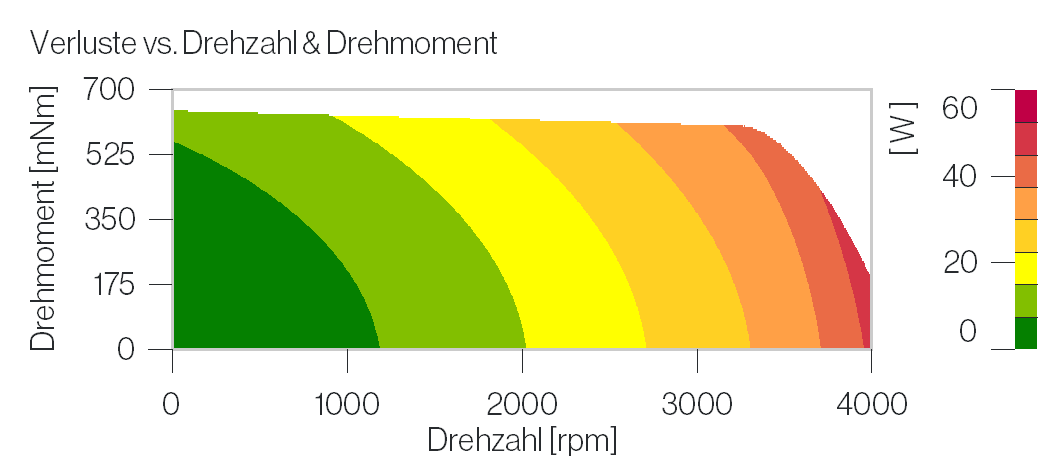
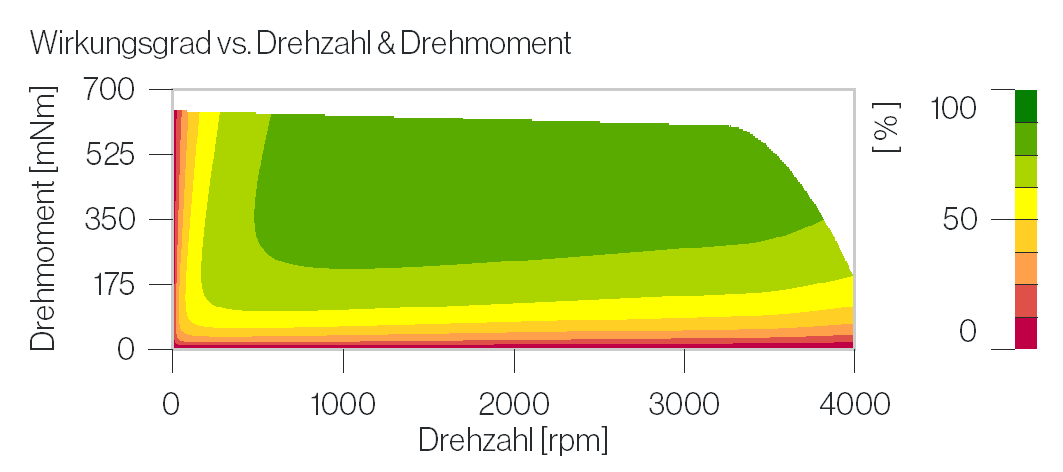
- inneres Drehmoment Leistungs- und Wirkungsgradkennfelder
- Kennfelder mit ohmschen, Reib- und Gesamtverlusten > D- und Q-Fluss in Abhängigkeit von D- und Q-Strom
- inneres Drehmoment
- diverse Qualitätsindikatoren
Fehlererkennung
imx METIS EC PI erkennt eine Vielzahl motorspezifischer Fehler – darunter Lagerschäden, Magnetisierungs-, Wicklungs- und Drehgeberfehler. Sowohl abweichende magnetische Eigenschaften der Blechpakete oder deren Form sowie Luft- spaltfehler können abgeleitet werden. Die identifizierten Parameter liefern damit nicht nur ein vollständiges Motorbild, sondern bilden gleichzeitig die Grundlage für eine belastbare Qualitätsaussage.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}